VIDEO
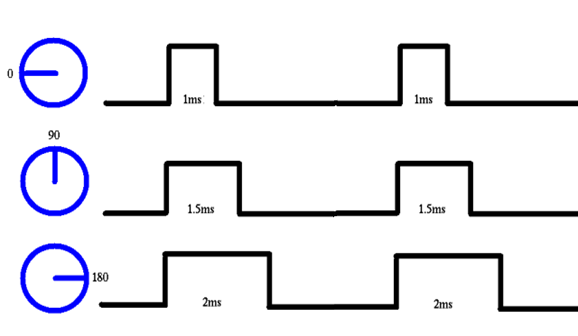
Сервопривод позволяет поворачивать вал двигателя в диапазоне от 0 до 180 градусов. Его часто используют в различных моделях, для поворота рулей. В последнее время их используют в сочленениях роботизированных механизмов. Сервопривод управляется импульсными сигналами (PWM, или ШИМ –сигналами):
#include <Servo.h>
Servo servo;
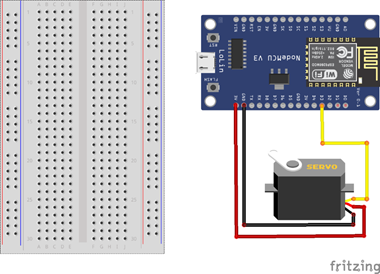
const int SERVO_PIN = D3;
// подбираем эти min- и max-значения
int minValue = 544;
int maxValue = 2400;
void setup()
{
servo.attach(SERVO_PIN, minValue, maxValue);
Serial.begin(9600);
printHelp();
}
int minLoopAngle = 45;
int maxLoopAngle = 135;
int loopStep = 1;
int loopSleep = 15;
int angle = 90;
int value;
void loop()
{
while(Serial.available()) {
processInput();
printHelp();
}
}
void processInput() {
int variant = Serial.parseInt();
if (Serial.available()) {
value = Serial.parseInt();
}
Serial.print("Команда "); Serial.print(variant);
Serial.print(" и значение параметра "); Serial.println(value);
switch (variant) {
case 1:
minValue = value;
servo.attach(SERVO_PIN, minValue, maxValue);
servo.write(angle);
break;
case 2:
maxValue = value;
servo.attach(SERVO_PIN, minValue, maxValue);
servo.write(angle);
break;
case 3:
minLoopAngle = value; break;
case 4:
maxLoopAngle = value; break;
case 5:
loopStep = value; break;
case 6:
loopSleep = value; break;
case 7:
for (angle = minLoopAngle; angle <= maxLoopAngle; angle += loopStep) {
servo.write(angle);
// Serial.print("Текущий угол: "); Serial.println(angle);
delay(loopSleep);
}
break;
case 8:
angle = value;
servo.write(angle);
break;
case 9:
angle += value;
servo.write(angle);
break;
default:
Serial.println("Непонятная команда.");
}
}
void printHelp() {
Serial.print("1 - Минимальный импульс мс (Текущее значение "); Serial.print(minValue); Serial.println(")");
Serial.print("2 - Максимальный импульс мс (Текущее значение "); Serial.print(maxValue); Serial.println(")");
Serial.print("3 - Начальный угол цикла ° (Текущее значение "); Serial.print(minLoopAngle); Serial.println(")");
Serial.print("4 - Конечный угол цикла ° (Текущее значение "); Serial.print(maxLoopAngle); Serial.println(")");
Serial.print("5 - Шаг цикла ° (Текущее значение "); Serial.print(loopStep); Serial.println(")");
Serial.print("6 - Пауза цикла мс (Текущее значение "); Serial.print(loopSleep); Serial.println(")");
Serial.println("7 - Запустить цикл");
Serial.print("8 - Повернуть на абсолютный угол ° (Текущее значение "); Serial.print(angle); Serial.println(")");
Serial.print("9 - Повернуть от текущего угла ° (Текущее значение "); Serial.print(angle); Serial.println(")");
Serial.println("Введите команду и через пробел, параметр");
}После ввода команды через монитор порта (на картинке ниже вводится команда 9 90 – повернуть вал двигателя на 90 градусов по часовой стрелке относительно текущего положения) в мониторе порта будет выведено напоминание о командах и текущих значениях параметров.